
2.4 First-order filters
In addition to the filter categories already introduced (low-pass, band-pass, etc.), filters are categorised by their order. The order of a filter is determined by the form of the differential equation governing the filter’s behaviour. The simplest type of filter, with the simplest equation, is called a first-order filter. Higher-order filters are more complex than first-order filters, both in their circuitry and in the differential equation that governs them. The higher the order, the more effective the filter.
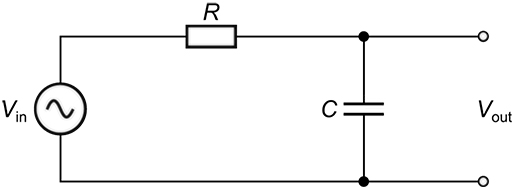
An example of a first-order filter is the simple circuit in Figure 8.
Activity 3
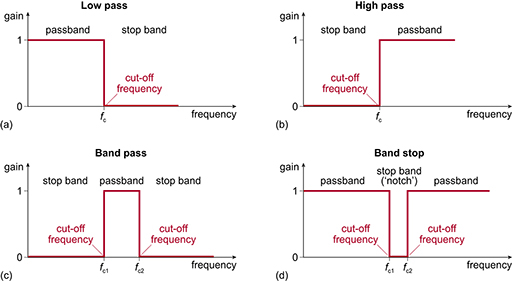
Which of the four categories of filter shown in Figure 5 does the filter in Figure 8 belong to? You should be able to work it out from the behaviour of the capacitor at low frequencies and high frequencies. Explain your answer.
Answer
It is a low-pass filter.
At 0 Hz, or DC, the capacitor is open circuit. Under those circumstances, all the input voltage would appear on the output. At high frequencies, the capacitor becomes increasingly like a short circuit, and the output voltage decreases as frequency increases. Therefore low frequencies are passed and high frequencies are (to some extent) blocked.
Low-pass and high-pass filters can be first-order, second-order, third-order, and so on. However, band-pass filters and band-stop filters must be second-order or higher, although it is possible to achieve their effect by combining two first-order filters.
Despite being the simplest type, a first-order filter is not simple to analyse mathematically, as its behaviour is governed by a first-order differential equation. This is what the voltage gain function of the filter in Figure 8 turns out to be:
You could plot a graph of the gain function against frequency from this equation, but the details would depend on the choice of and . However, irrespective of the values chosen for and , the general shape and certain other properties of the gain function would be the same for any first-order low-pass filter. Therefore, rather than show how the gain function changes with frequency for particular values of and , in the next section you will look at a ‘normalised’ version of the gain function. (Normalisation is the presentation of information in a generalised way that can easily be adapted to specific cases.)